Onderdelen controleren#
Doen
10 min
Voordat we kunnen beginnen, moeten we even kijken of we alle onderdelen hebben die we voor de komende workshops nodig hebben.
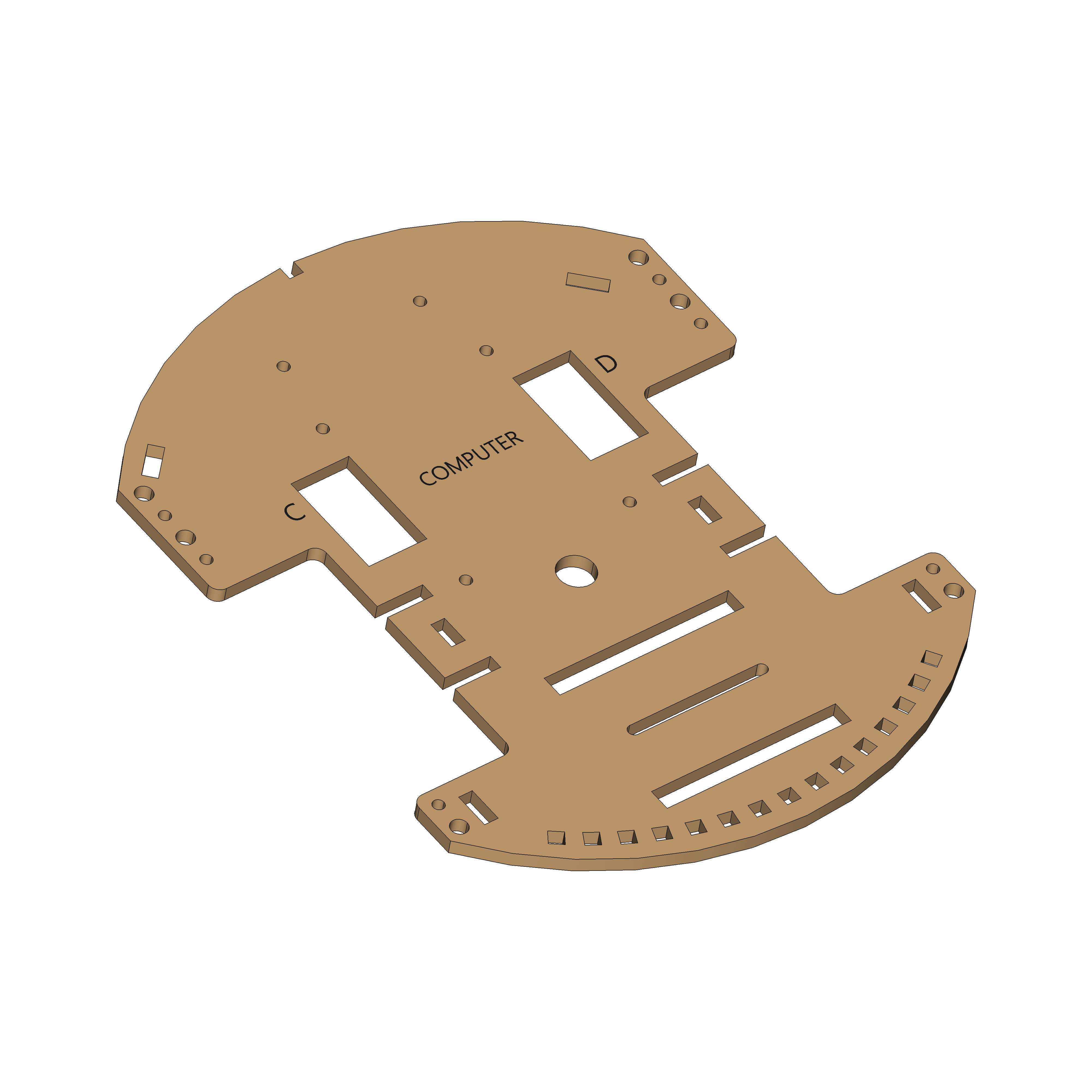
1x Computer
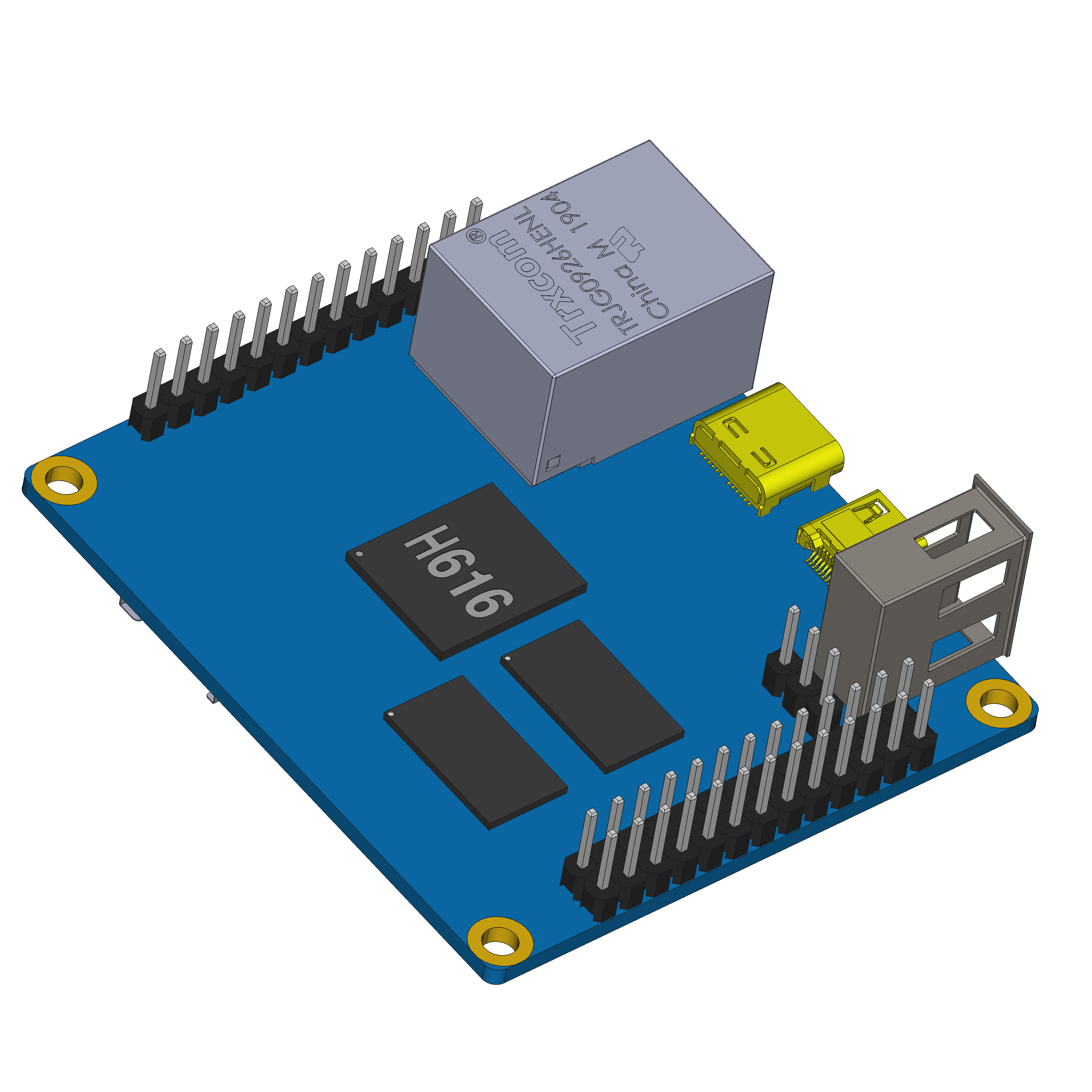
De computer is het brein van de robot. Hier komt alle informatie van de sensoren binnen. Daarna wordt bepaald wat er bij deze metingen moet gebeuren. De computer stuurt vervolgens een signaal naar de microcontroller mo de actuatoren aan te sturen. De computer zorgt ook voor de verbinding met je laptop.
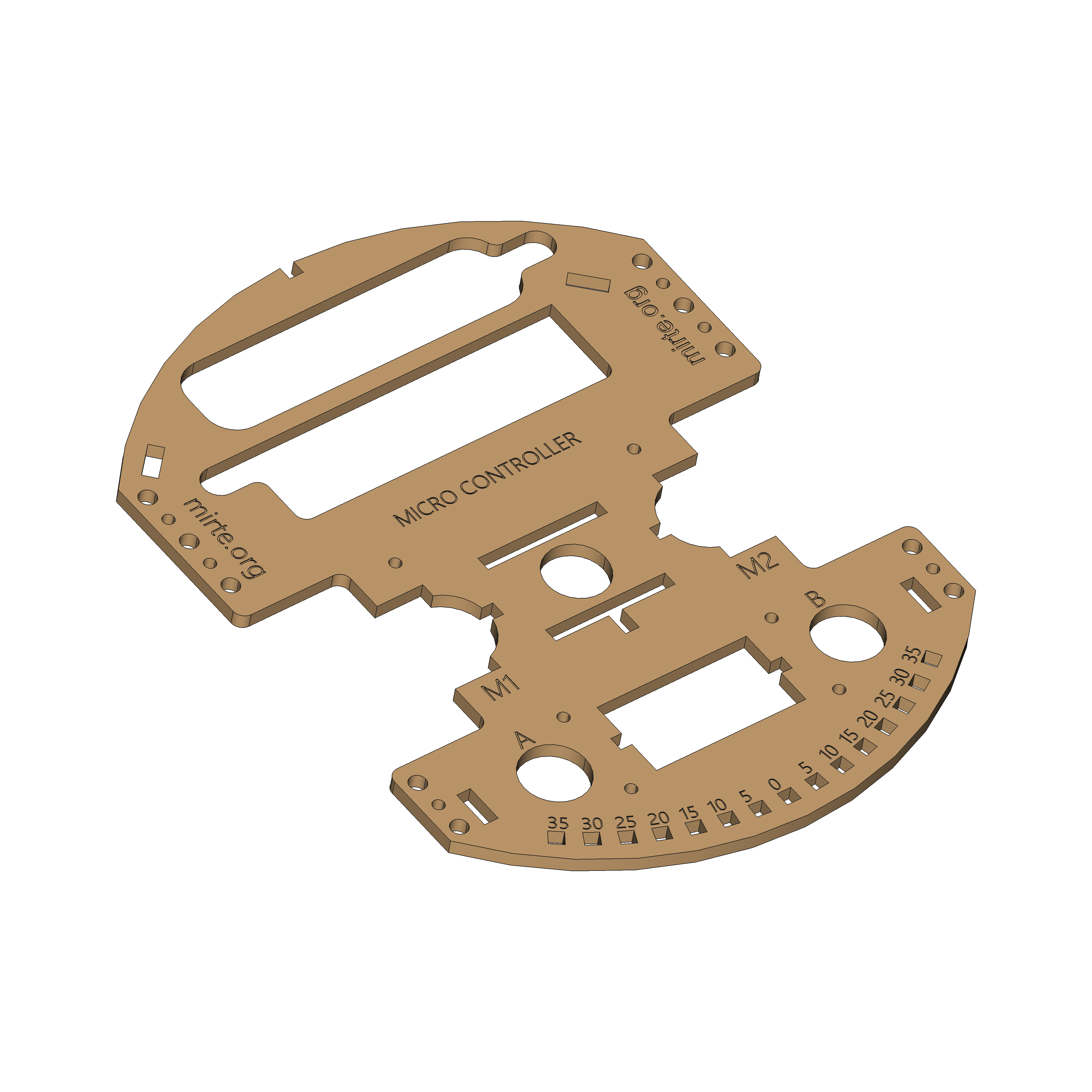
1x Micro Controller
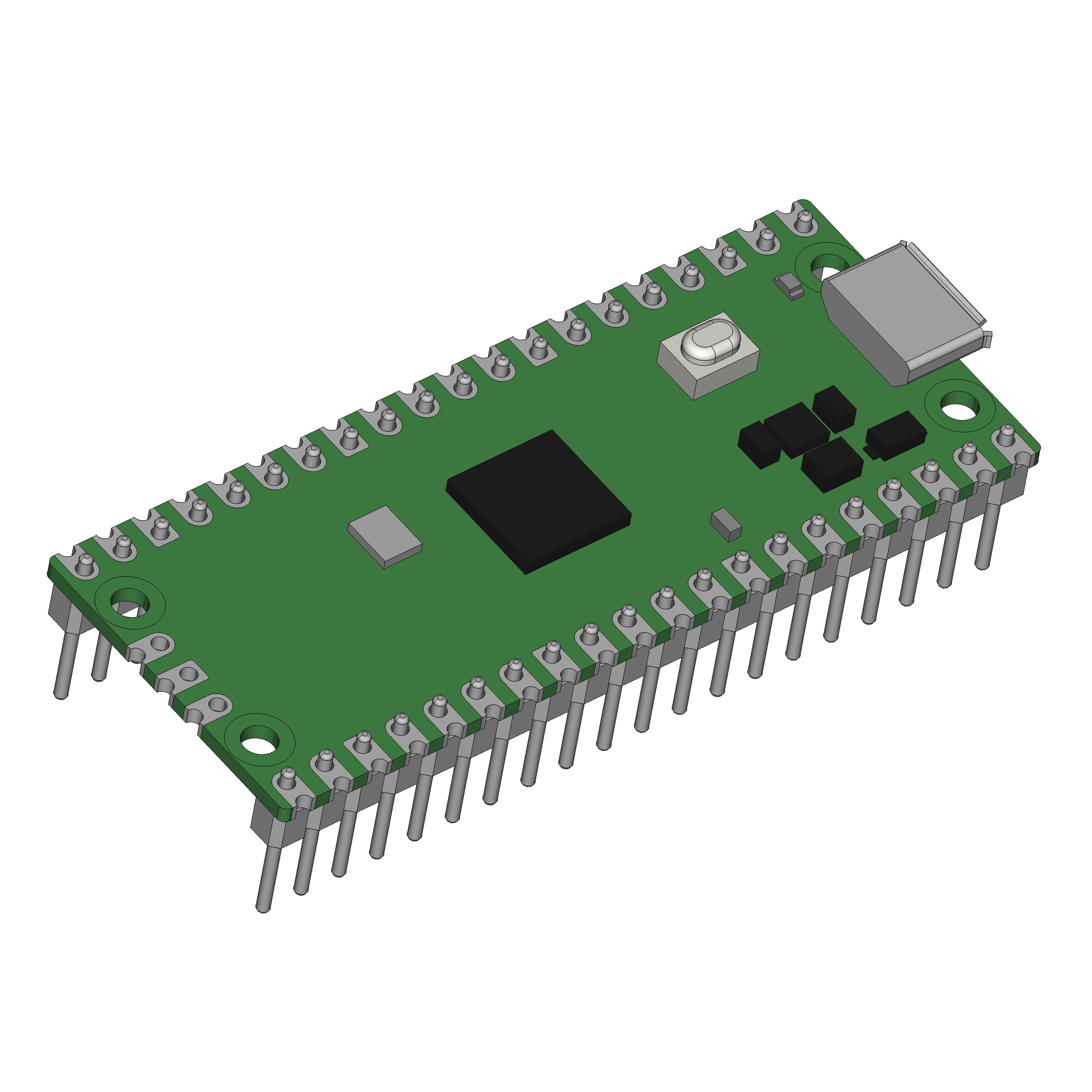
De microcontroller ontvangt de metingen van de sensoren en stuurt deze door naar de computer. Daarna ontvangt de microctonroller instructies van de computer om de actuatoren (zoals de motoren) aan te sturen.
1x Motor Regelaar
De motorregelaar zorgt er voor dat de motoren de jusite hoeveelheid spanning (V) krijgen zodat deze op de gewenste snelheid gaan draaien. Zonder deze regelaar zouden we alleen de motor aan of uit kunnen zetten.
1x Mirte PCB
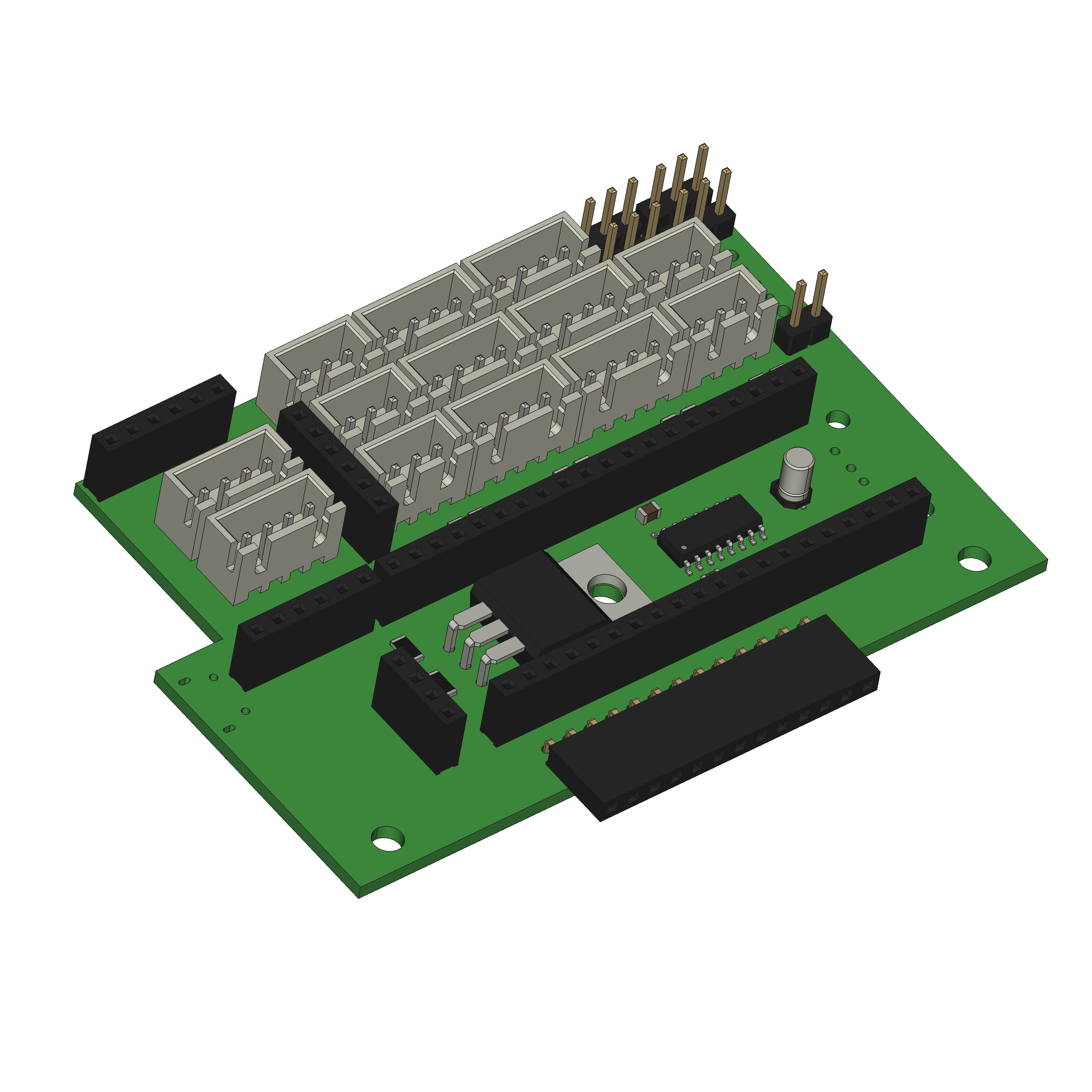
Om alles makkelijk op en elkaar aan te sluiten kan je de Mirte PCB gebruiken. Hier koppel je de computer, microcontroller, motor regelaar en alle sensoren en actuatoren aan elkaar.
1x Batterij
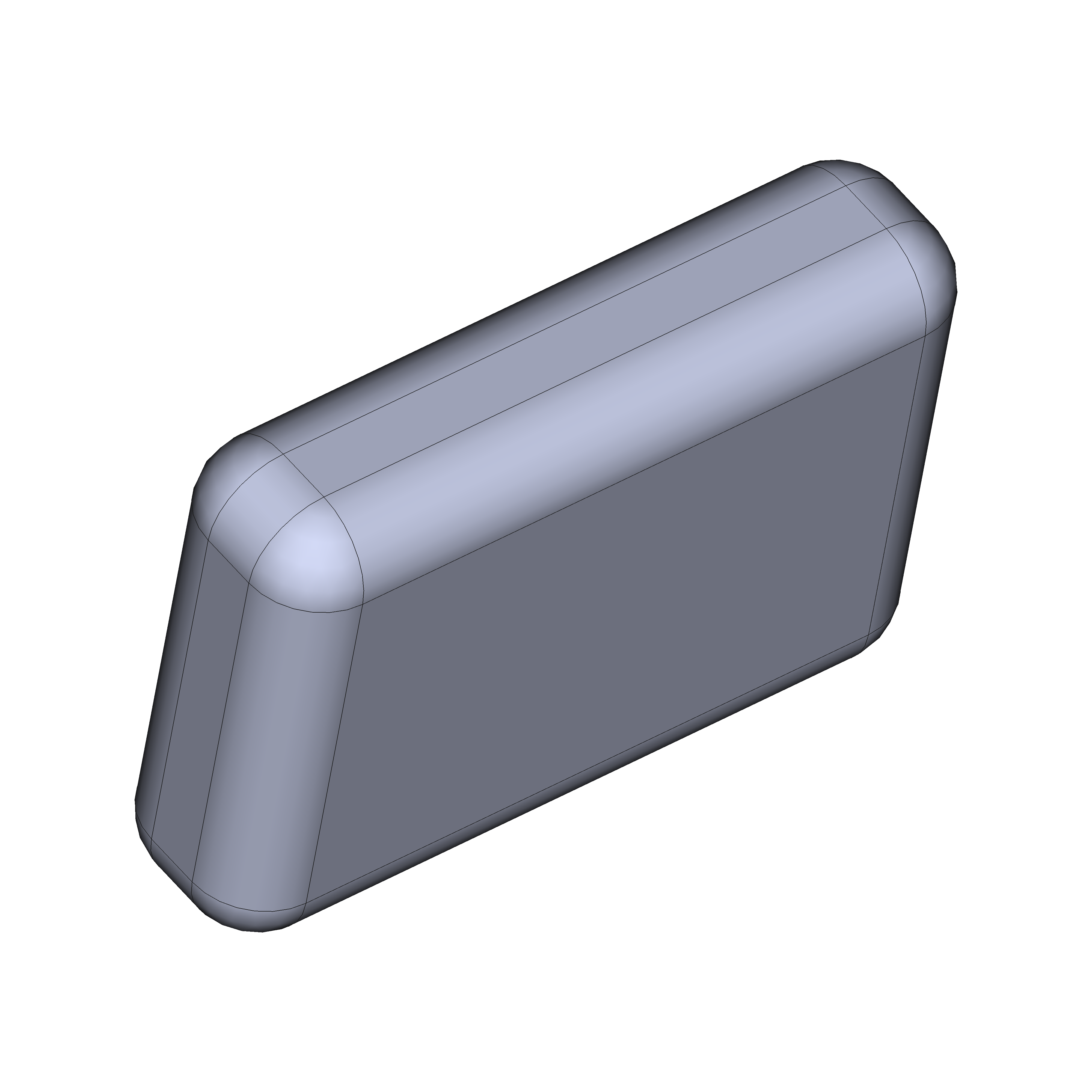
Uiteraard heeft de robot ook energie nodig. Dit is bij een robot een electrische batterij. Deze zorgt er voor dat alle electronische onderdelen kunnen werken.
2x Motor

De motor zorgt er voor dat de wielen kunnen draaien zodat je robot ook echt rond kan rijden.
2x Wiel

De wielen zorgen er voor dat je robot rond kan rijden.
1x Kogelwiel
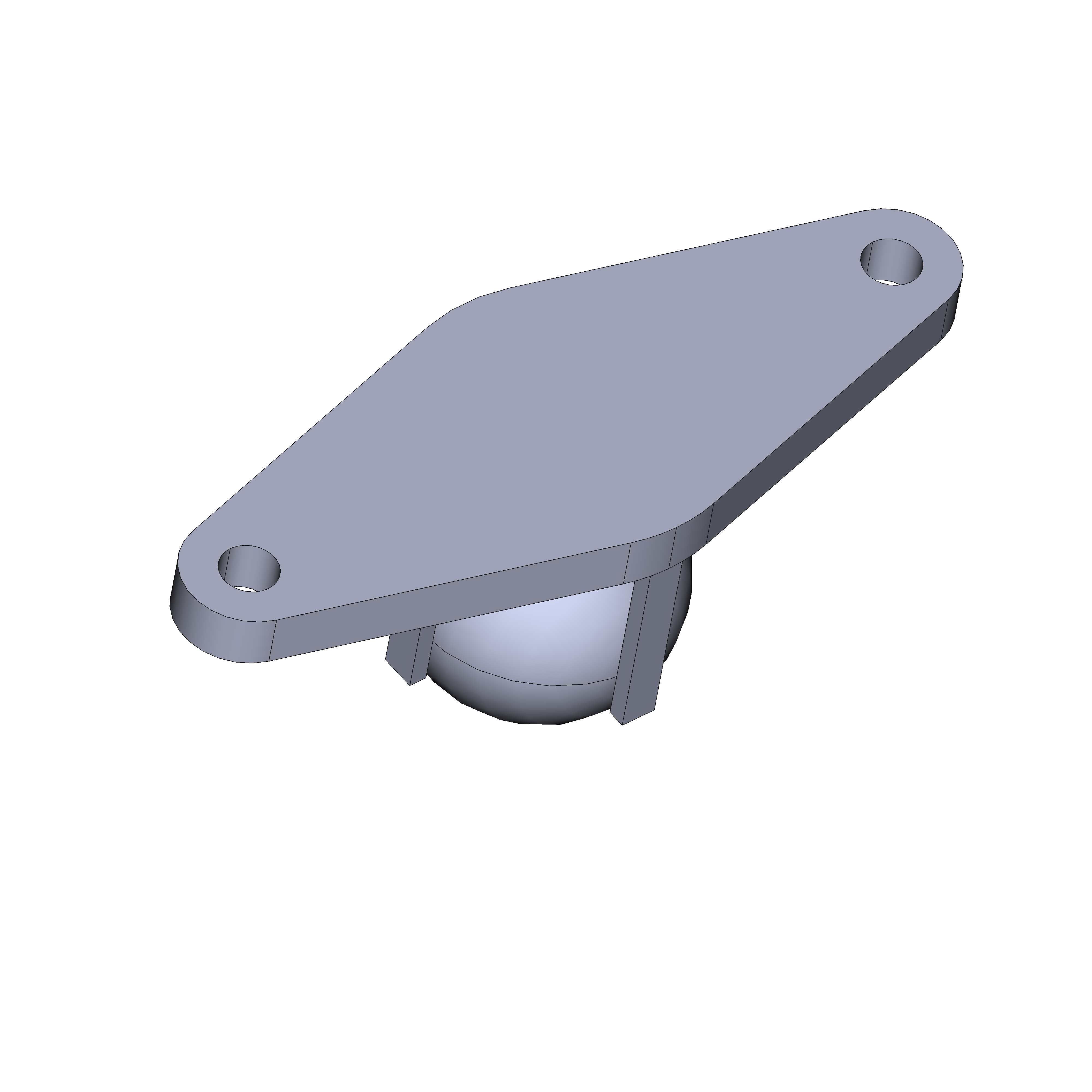
Het kogelwiel zorgt er voor dat je robot niet omvalt. Als je robot alleen maar 2 wielen zou hebben zou hij uit zichzelf moeten gaan balanceren (iets dat best moeilijk is).
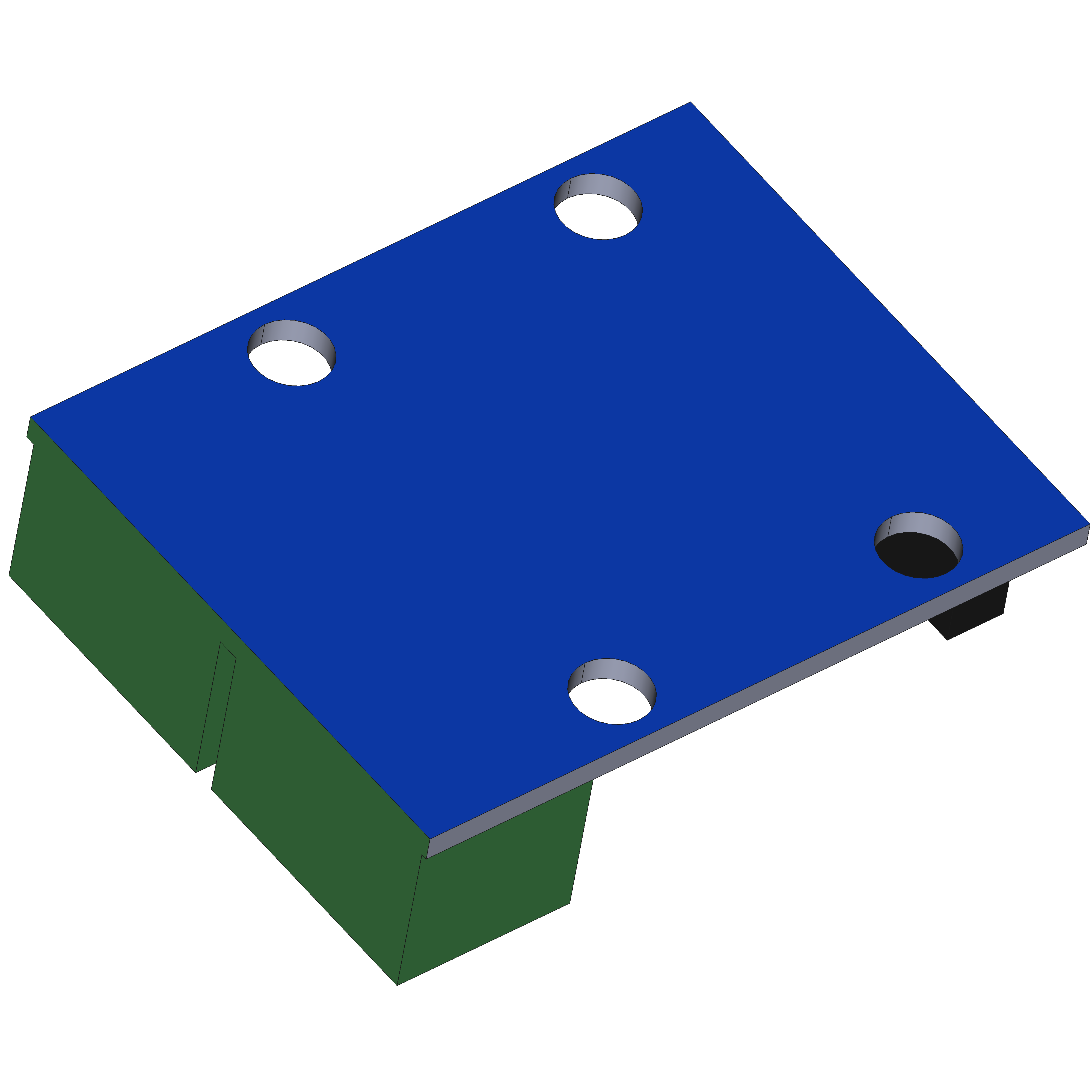
1x Lijnvolg Sensor
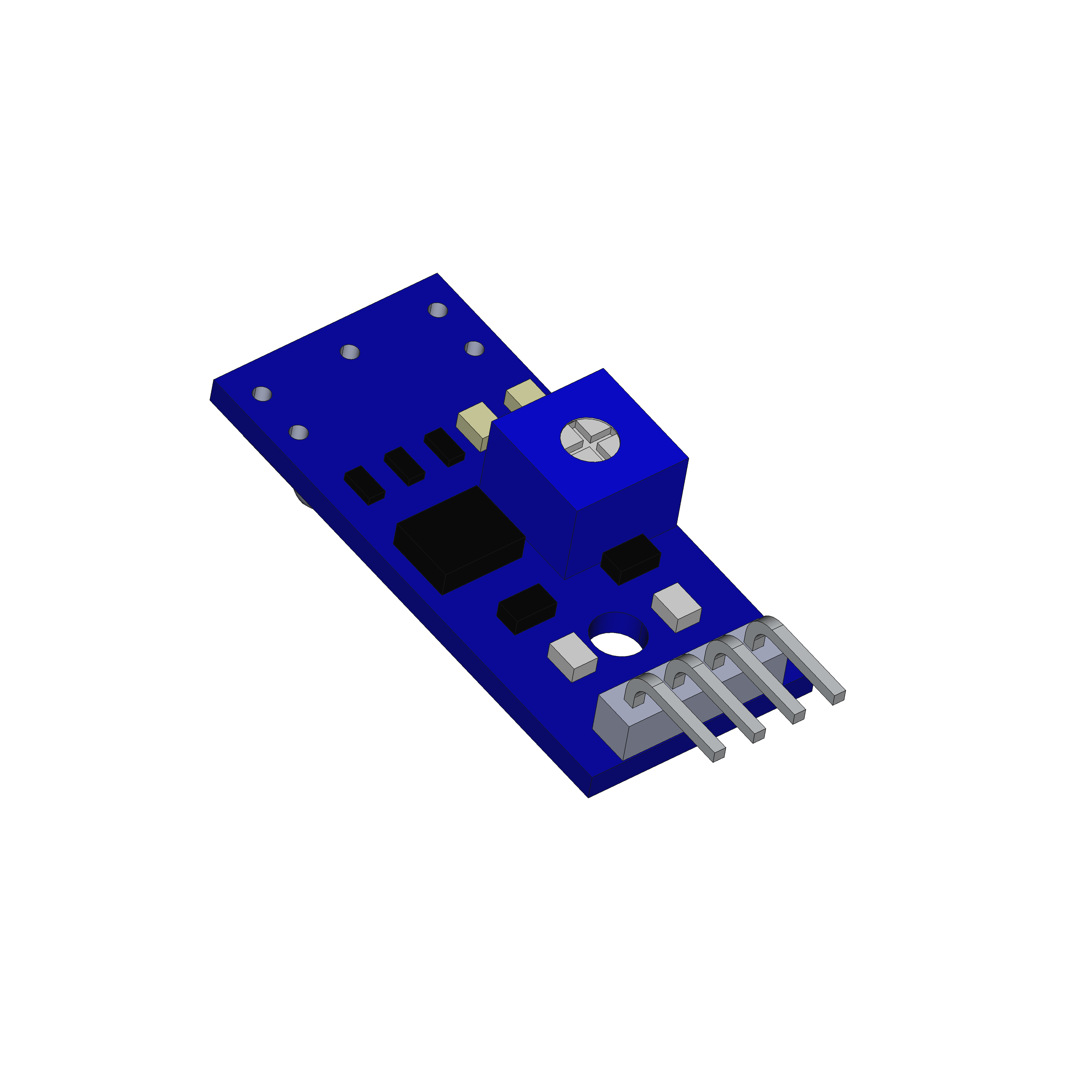
De lijnvolg sensor meet hoe donker het voorwerp is wat er voor staat. Dit kan dus de grond zijn en daardoor kan deze sensor meten of er een (donkere) lijn op een (lichtere) achtergrond is.
1x JST Kabel (4 pin)
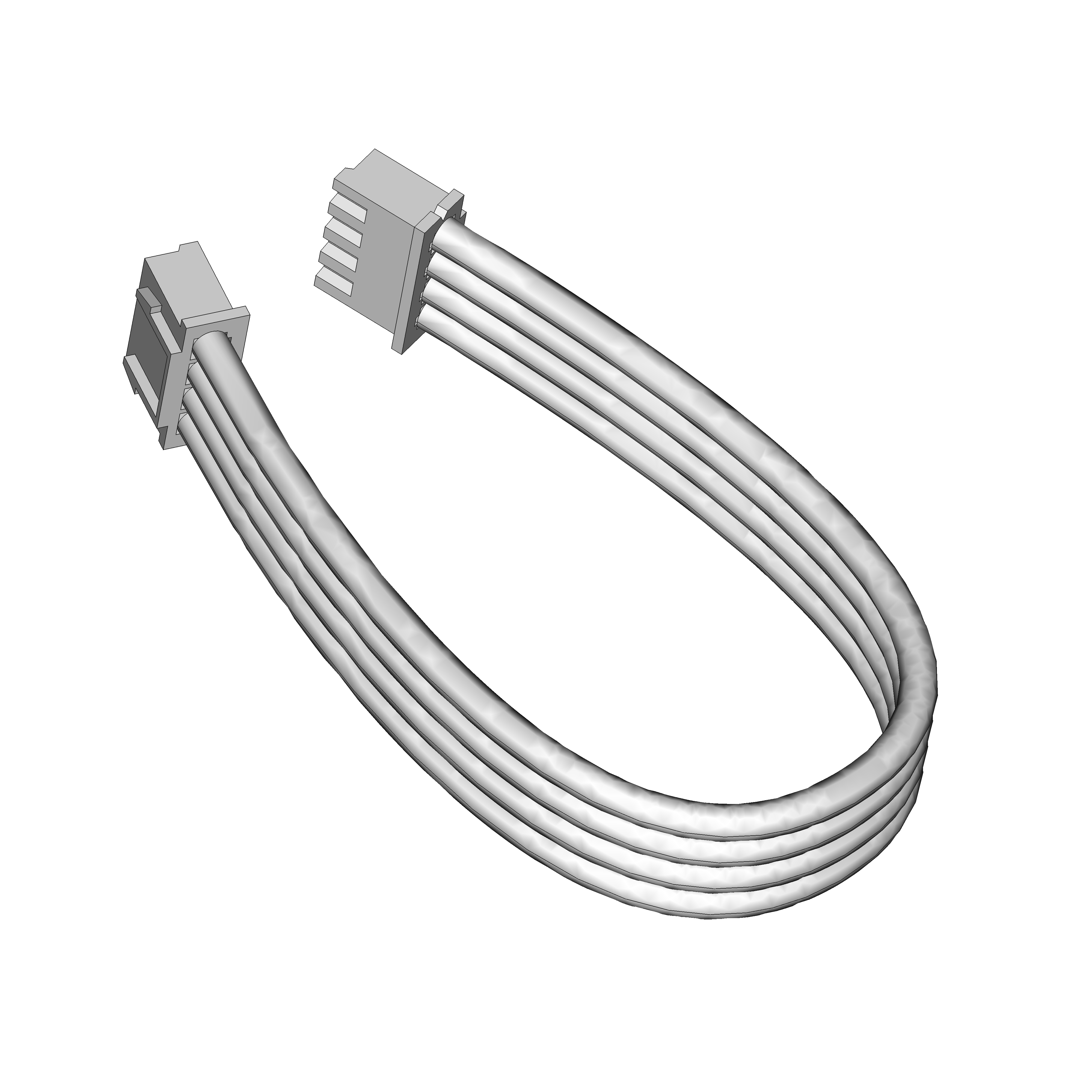
Om de sensoren makkelijk aan te sluiten hebben we deze kabels nodig.
1x USB Kabel
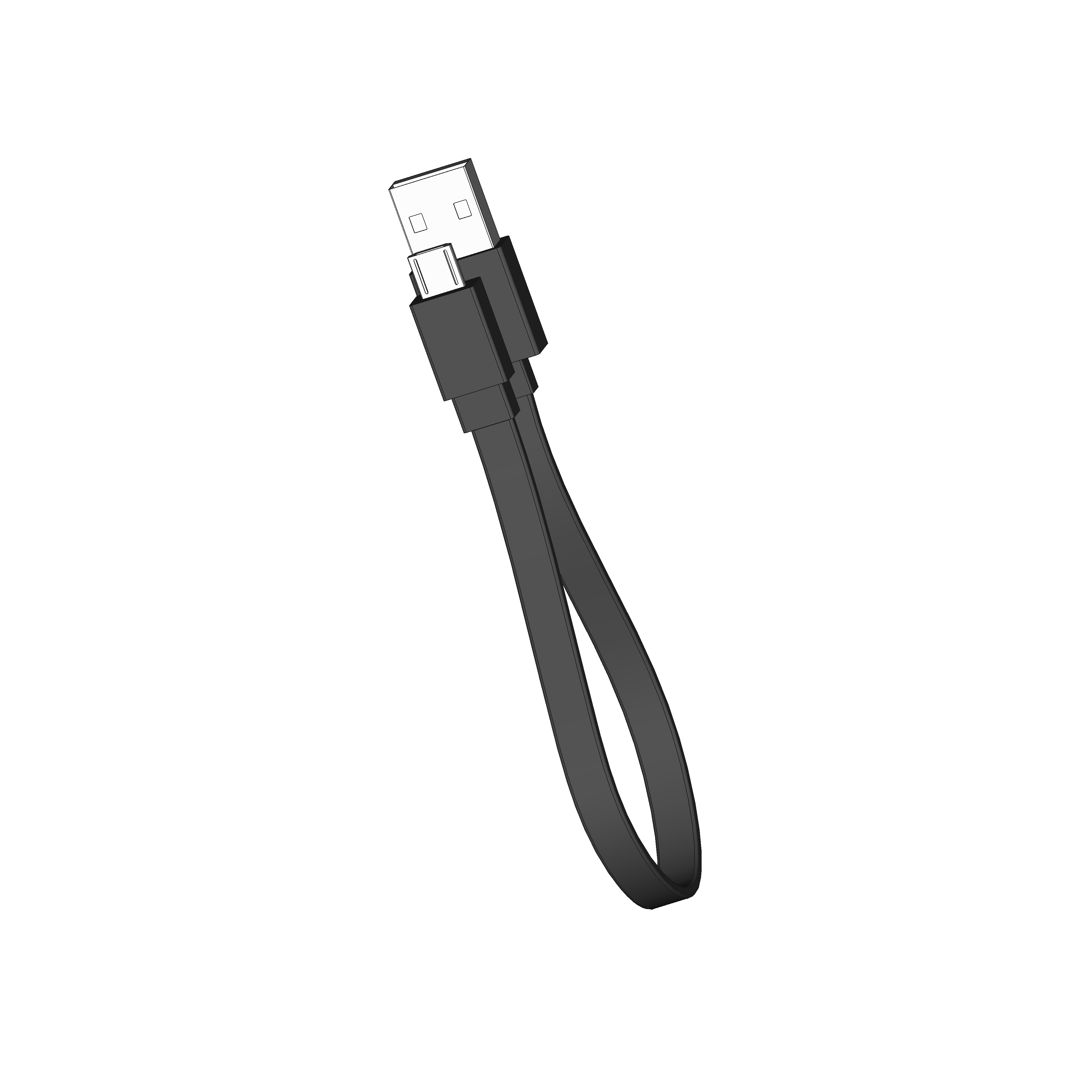
De USB kabel hebben we nodig om daadwerkelijk de batterij aan de PCB aan te sluiten zodat we die aan kunnen zetten.
1x Houten Frame
1x Onderplaat
1x Bovenplaat
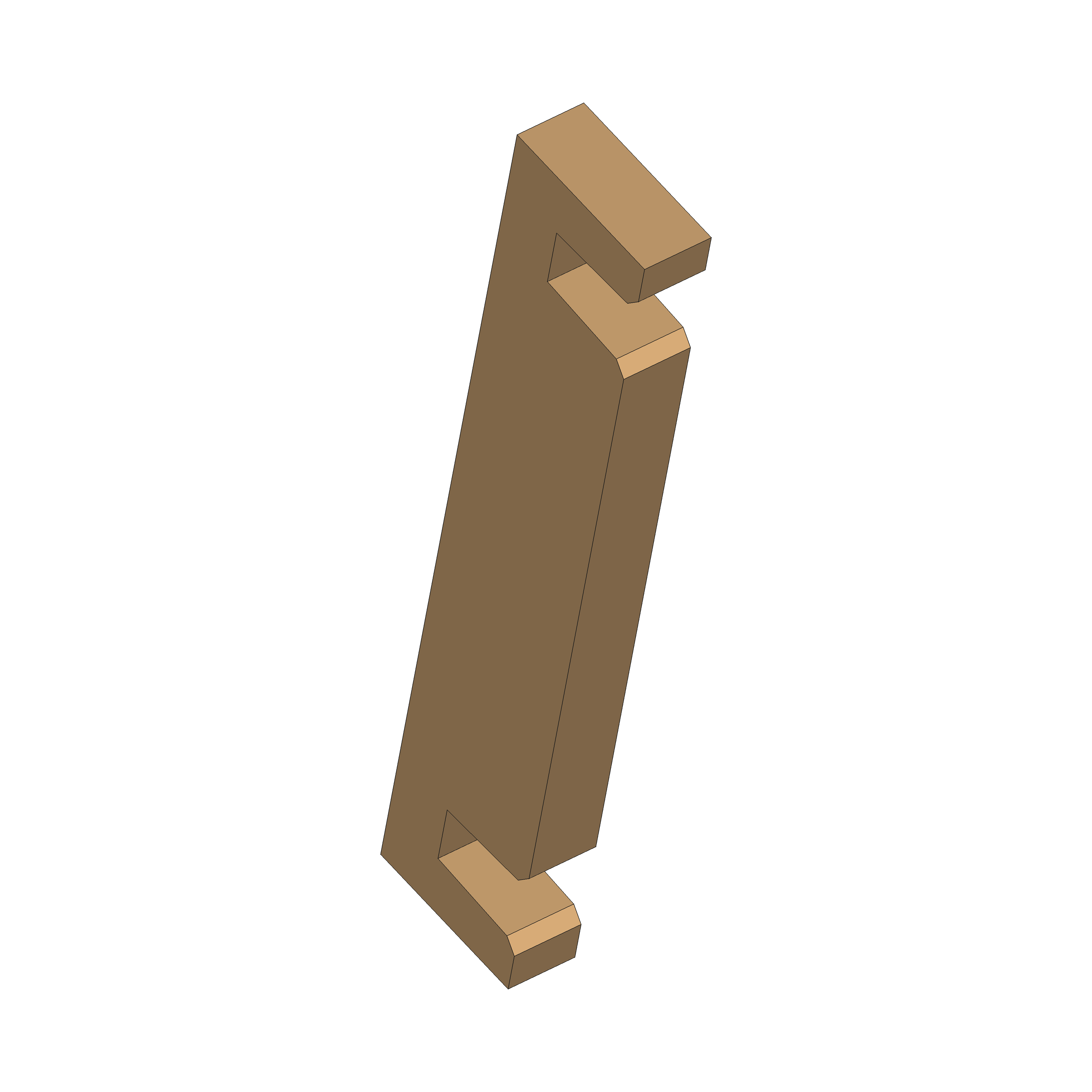
2x Motor Klem
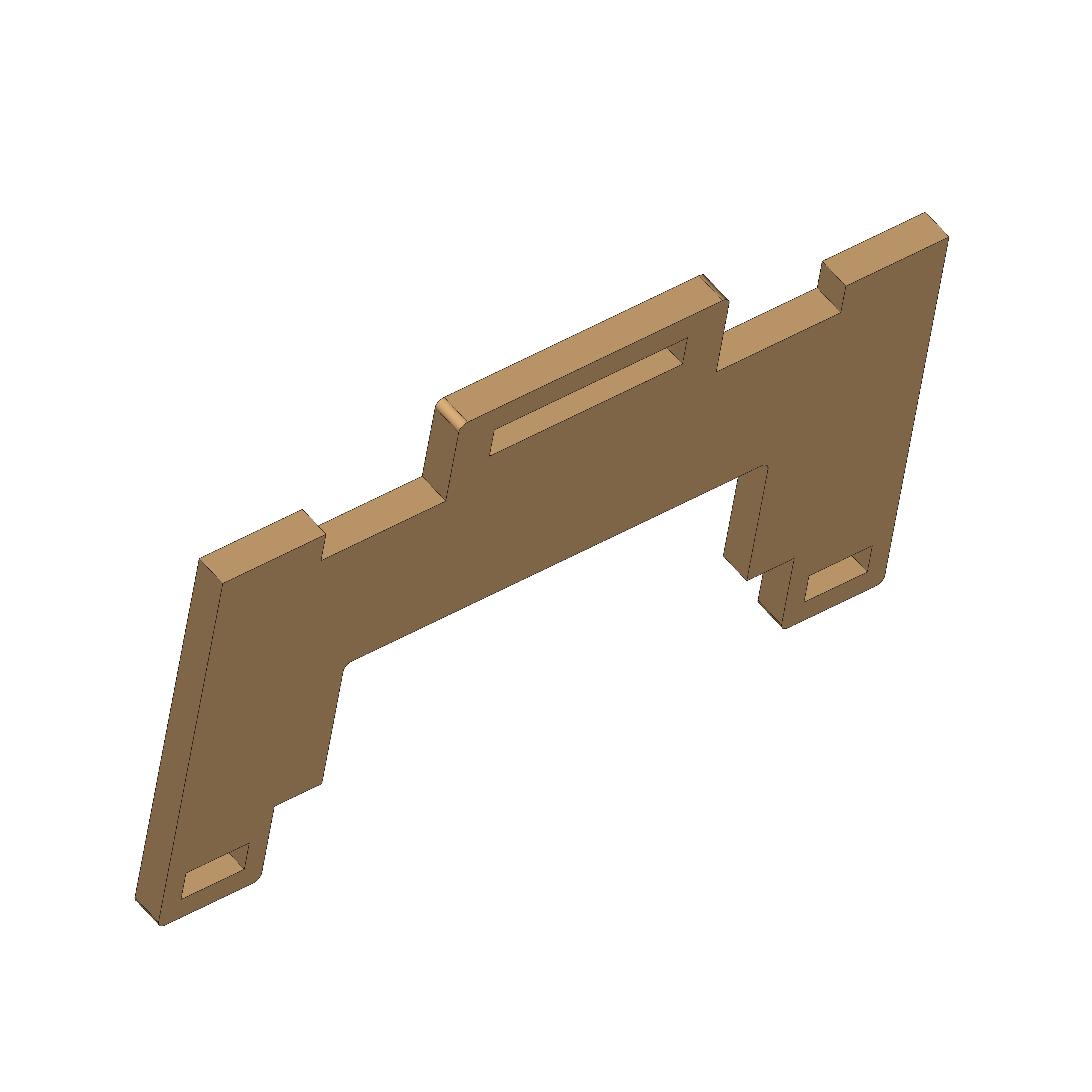
2x Motor Wig
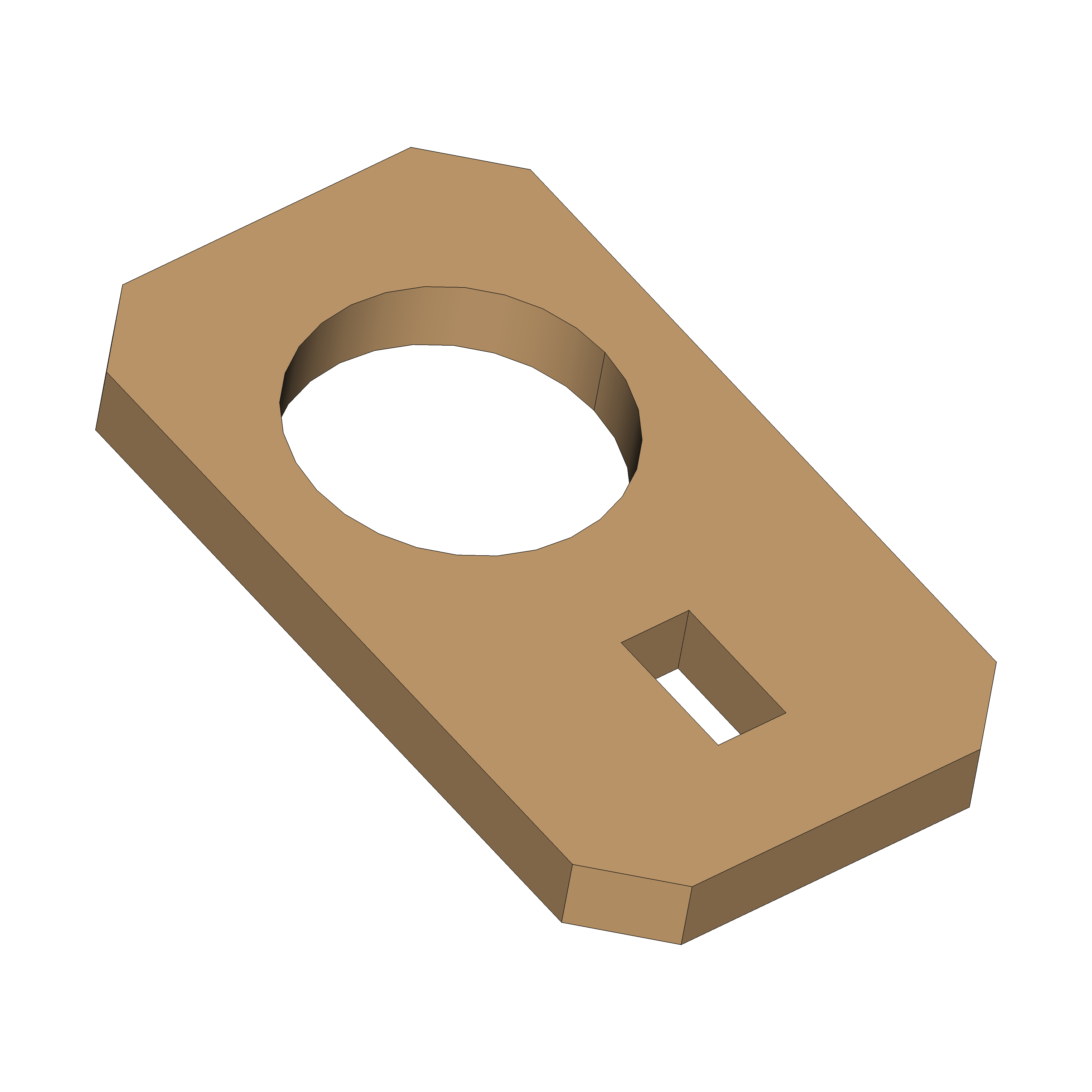
1x Plaat Klem
4x Standoff
5x Wig
Het frame heb je nodig om te zorgen dat alle onderdelen goed bij elkaar blijven.