Rijden maar#
Programmeren
15 min
1#
In de vorige workshop heb je de robot aangezet. Maar ze doet nog niets. Ze staat nog wel steeds stil. In deze workshop leer je hoe je de robot rond kan laten rijden en waarom niet alle motoren hetzelfde zijn.
LET OP
In deze workshop ga je met de robot rondrijden. Om te zorgen dat je robot niet stuk gaat moet er altijd voor zorgen dat je robot op de vloer staat en dus niet van je tafel afrijdt!
2#
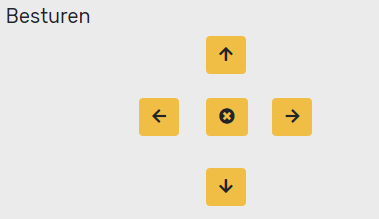
Je had het misschien al gezien, aan de rechterkant van het paneel vind je in het ‘besturen’ tabblad bij ‘actuatoren’ ook de motoren op de motor aanzetten. De makkelijkste manier om dit te doen is om op de pijltjes te klikken bij ‘Besturing’. Probeer je robot maar eens een stukje te laten rijden. Met het pijltje naar boven zou de robot naar voren moeten rijden.
Help
- Als er geen enkele motor draait:
Controleer of de motordraadjes goed in de motor controller zitten.
Controleer of het lampje van de motorcontroller aan is. Als deze niet aan is kan je kijken of deze goed in de PCB zit. Als ook dat klopt kan je nog even controleren of misschien een motor controller van een andere robot wel werkt.
- Als de motoren wel draaien, maar ze gaan de verkeerde kant op:
Het kan natuurlijk zijn dat je de draadjes van de motoren niet goed hebt aangesloten. Kijk hoe je de draadjes goed aan kan sluiten totdat het wel goed werkt.
3#
De robot zou nu een stukje moeten gaan rijden. Het kan zijn dat je robot nog wat te snel gaat, of dat ze te langzaam draait. Je kan dit proberen in te stellen door de snelheid en draaisnelheid aan te passen. Omdat niet alle motoren hetzelfde zijn zal dit voor elke robot anders zijn. Het kan zelfs zo zijn dat de beide motoren in je robot iets anders bewegen (en de robot dus niet rechtdoor gaat).

4#
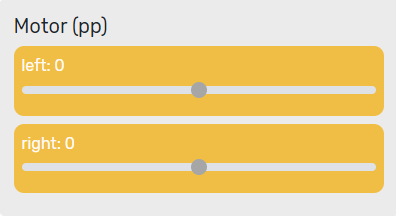
Dat beide motoren niet precies hetzelfde zijn kunnen we ook op een andere manier bekijken. We kunnen de motoren namelijk ook los van elkaar aanzetten. Elke motor kunnen we een waarde tussen de -100 en 100 geven.
-100 |
maximaal achteruit |
0 |
stop |
100 |
maximaal vooruit |
Elke motor is anders en zal bij een andere waarde pas beginnen met rijden. Tot die tijd zal je een soort piepje horen. Dat komt omdat de motor wel wil draaien, maar nog te veel weerstand voelt.
4#
Opdracht: Laat de robot op de grond staan en probeer van beide motoren de waardes te vinden wanneer ze beginnen te draaien.
De linker motor draait… |
|
|---|---|
… vooruit vanaf waarde: |
… |
… achteruit vanaf waarde: |
… |
De rechter motor draait… |
|
|---|---|
… vooruit vanaf waarde: |
… |
… achteruit vanaf waarde: |
… |
5#
Opdracht: Til de robot nu op van de grond en probeer van beide motoren de waardes te vinden wanneer ze beginnen te draaien.
De linker motor draait… |
|
|---|---|
… vooruit vanaf waarde: |
… |
… achteruit vanaf waarde: |
… |
De rechter motor draait… |
|
|---|---|
… vooruit vanaf waarde: |
… |
… achteruit vanaf waarde: |
… |
6#
Je merkt dat de waardes anders zijn als de robot op de grond staat of niet. Als de robot op de grond staat ondervindt ze wrijving van de grond, waardoor de motor beter zijn best moet doen voordat deze gaat draaien.
Maar zoals je misschien ook gezien hebt kunnen deze waardes ook per motor iets anders zijn. Elke motor is weer anders en zal bij een iets andere waarde starten.
Maar ook de batterij kan hier invloed op hebben. Het kan dus zijn dat de waardes ook anders zijn als de batterij minder vol is.
TIP
Het beste is dus om te zorgen dat je batterij altijd goed opgeladen is.
6#
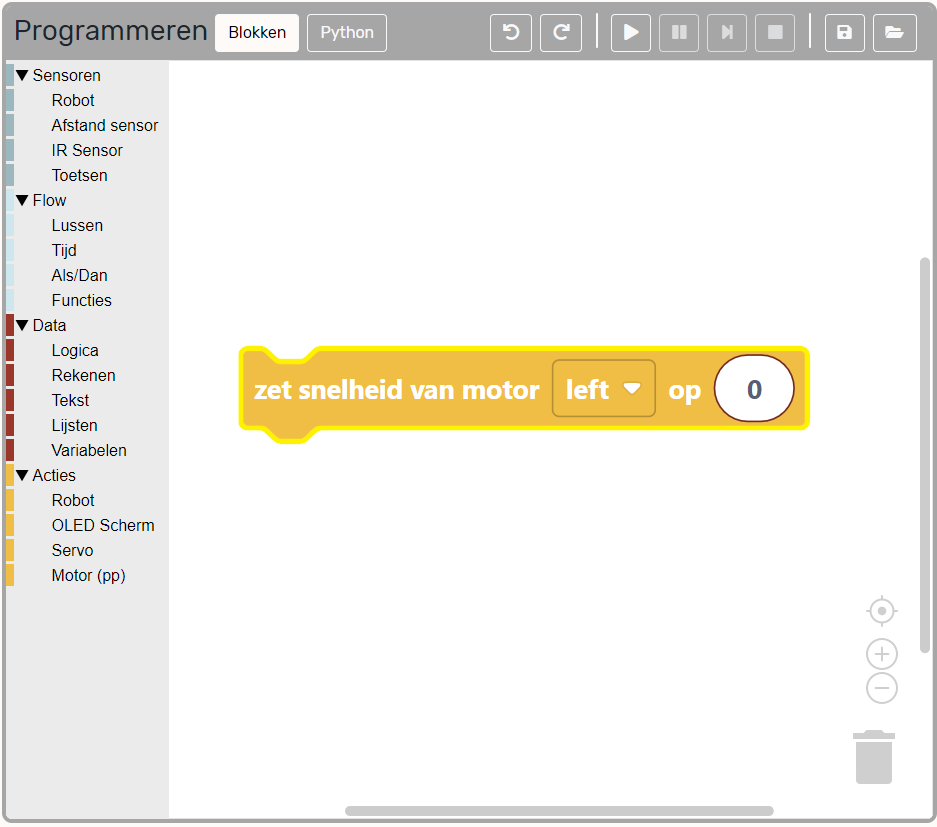
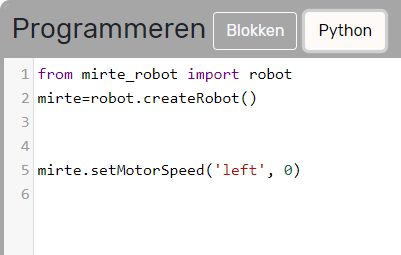
Uiteraard kan je de robot ook zelf programmeren. Hiervoor kan je naar het ‘Programmeren’ tabblad. Bij ‘acties’ zie je ‘Zet snelheid van motor links op 0’ staan. Deze kan je gebruiken om de robot te laten rijden.
7#
Als je tevreden bent over wat je gemaakt hebt kan je de robot laten doen wat daar staat door op de ‘play’ knop te drukken. De robot gaat dan als het goed is bewegen.

Help
- Als de robot niet rijdt:
Dat klopt en wordt uitgelegd in de volgende stap.
8#
Als je de robot het programma nu uit laat voeren zal je merken dat de robot niet echt vooruit komt. Dit komt omdat we de robot haar motoren laten stoppen zodra het programma klaar is. Met moeten dus nog tegen de robot zeggen dat ze niet meteen hoeft te stoppen.
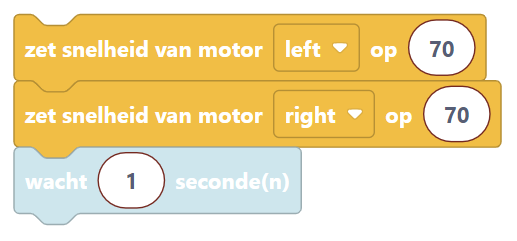
9#
Opdracht: Probeer nu de robot zo te programmeren zodat ze een vierkantje gaat rijden. Of een rondje?
Met ‘wacht x seconden’ kan je ook de grootte van het vierkant veranderen.